
In this project, we design, implement and deploy a mixed-reality-based method with HoloLens 2 that enables users to control the Boston Dynamics Spot robot.
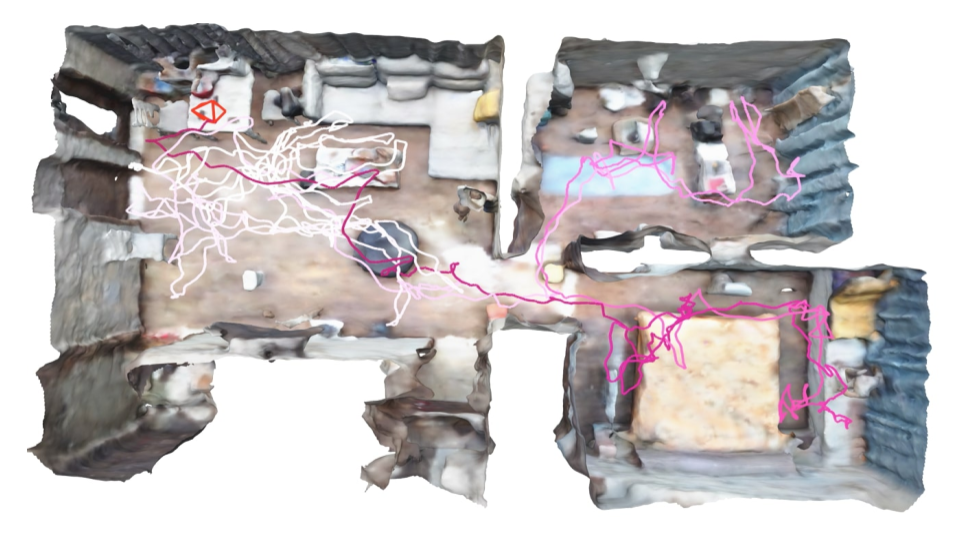
In this project, we present a sparse version of NICE-SLAM, which is a SLAM system incorporating the idea of Voxel Hashing into NICE-SLAM framework. Instead of initializing feature grids in the whole space, voxel features near the surface are adaptively added and optimized.
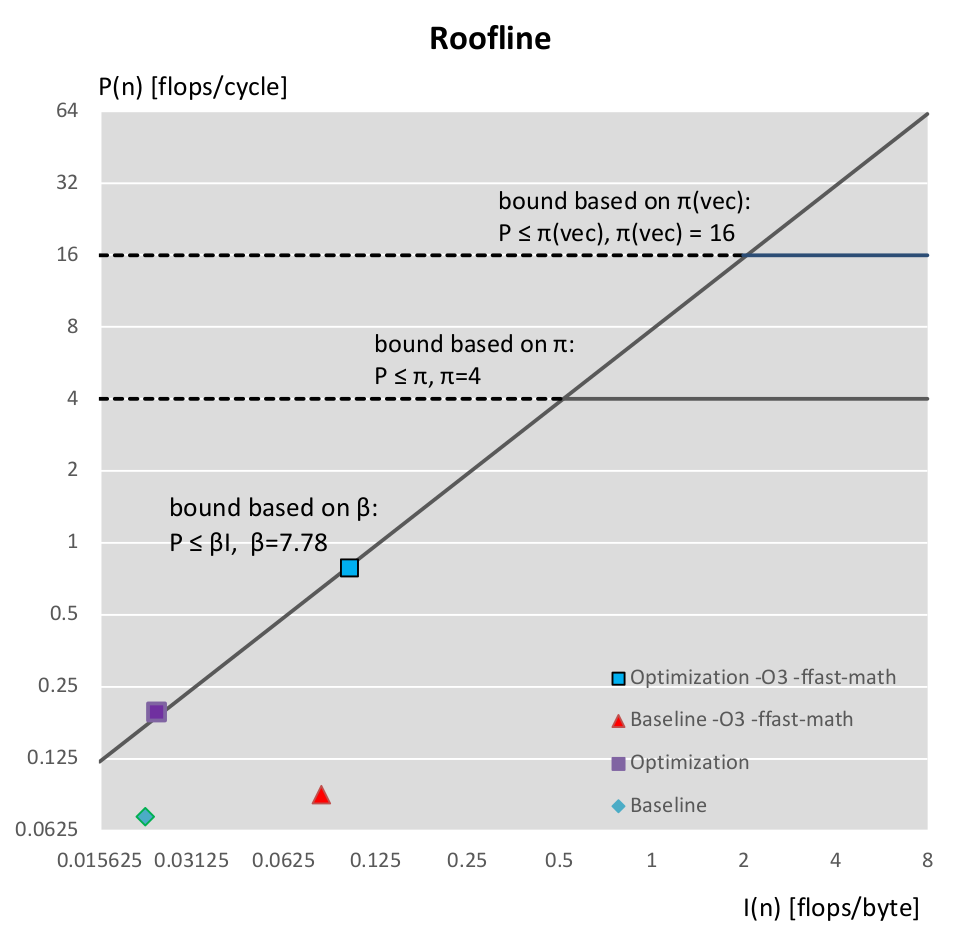
Focus on speeding up black-box optimization algorithm OPUS from paper Particle Swarm with Radial Basis Function Surrogates for Expensive Black-box Optimization by Rommel G. Regis.
Besides, we implement the speed-up C++ version of Bunch-Kaufman Pivoting.
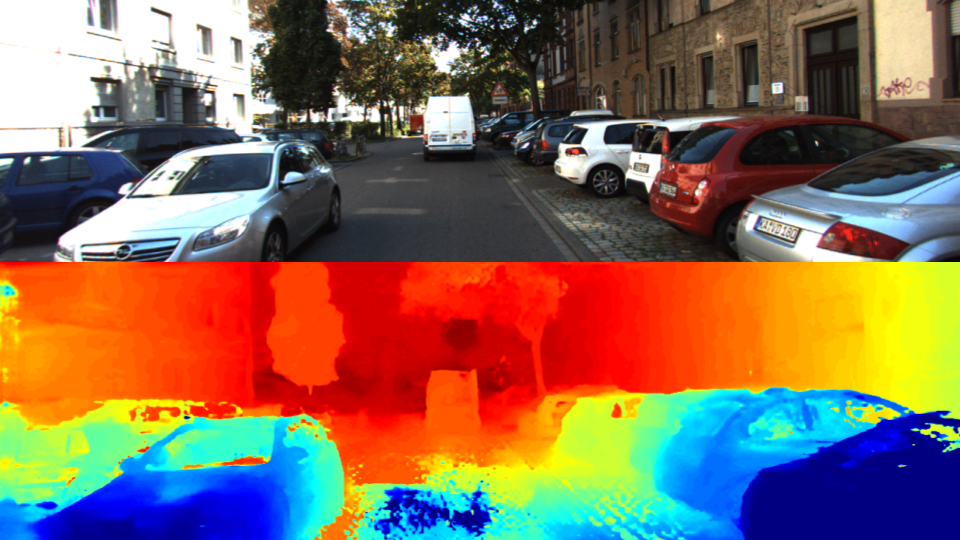
Combining PSM Net, group-wise corr, dilatedResNet, semantic segmentation information to estimate accurate disparity of stereo image pairs efficiently.

We design a path-finding algorithm that could generate a path to draw a portrait/character in one stroke. Then we use our self-designed control system to draw this path. This project could be used with any arm-robot with at least 4 joints.