About me
Hi, I’m Ganlin Zhang (张甘霖), a PhD student at Technical University of Munich, supervised by Prof. Daniel Cremers. Currently I focus on Visual SLAM, Structure from Motion and 3D reconstruction.
Previously, I received my Master’s degree in Computer Science from ETH Zurich, where I worked on 3D Vision research projects with Prof. Luc Van Gool and Prof. Marc Pollefeys. Before that, I obtained my Bachelor’s degree in Computer Science from ShanghaiTech University, supervised by Prof. Laurent Kneip. During my undergraduate studies, I also spent a year at UC Berkeley, as a visiting student.
News
- 2025.11: 🎉🎉 ViSTA-SLAM has been accepted to 3DV 2026!
- 2025.11: 🎉🎉 SNI-SLAM++ has been accepted to T-PAMI!
- 2025.09: 🎉🎉 BA-Track has been selected as Best Paper Candidate of ICCV 2025!
- 2025.06: 🎉🎉 BA-Track has been accepted to ICCV 2025 and selected for an oral presentation!
- 2024.08: I have joined TUM Computer Vision Group as a PhD student, supervised by Prof. Daniel Cremers!
- 2023.03: 🎉🎉 My first first-author paper "Revisiting Rotation Averaging: Uncertainties and Robust Losses" has been accepted by CVPR 2023! Thanks to my advisors and coauthors Dr. Viktor Larsson and Dr. Dániel Béla Baráth for the huge amount of help. The code is already available in Github.
Publications
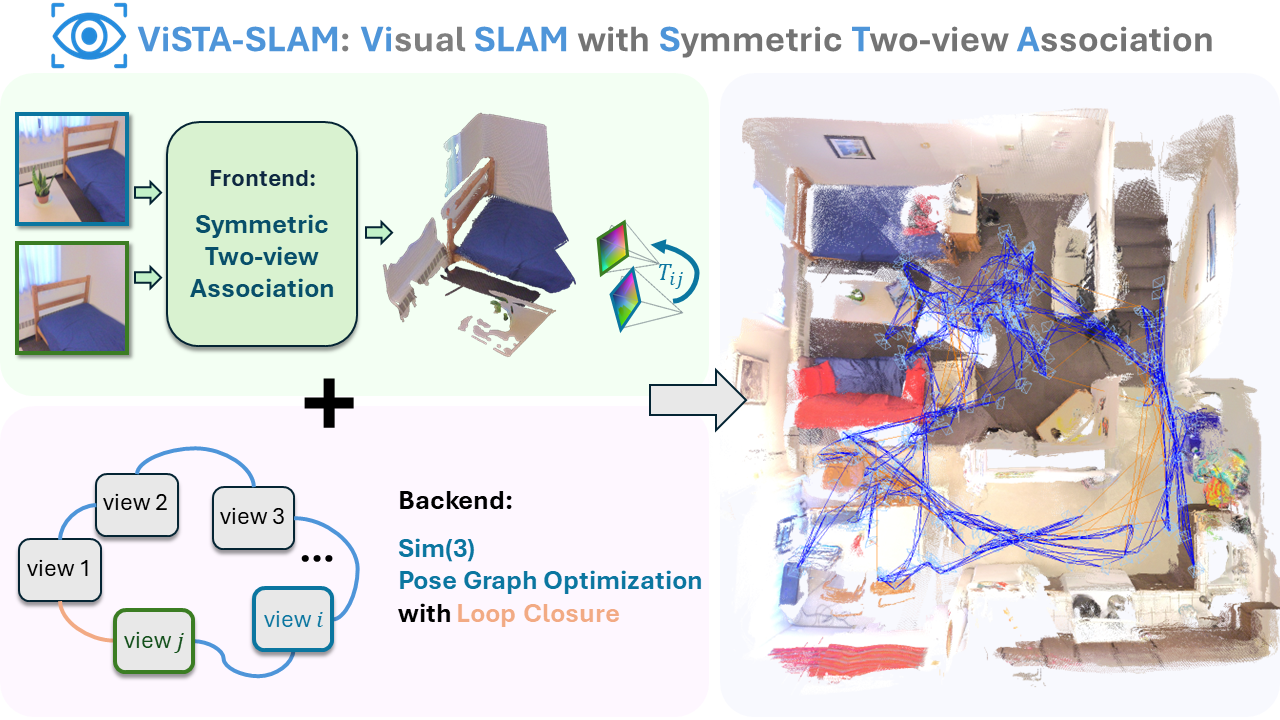 | Ganlin Zhang, Shenhan Qian, Xi Wang, Daniel Cremers 3DV 2026 Github Repo | ArXiv | Project website ViSTA-SLAM is a real-time monocular dense SLAM pipeline that combines a Symmetric Two-view Association (STA) frontend with Sim(3) pose graph optimization and loop closure, enabling accurate camera trajectories and high-quality 3D scene reconstruction from RGB inputs. |
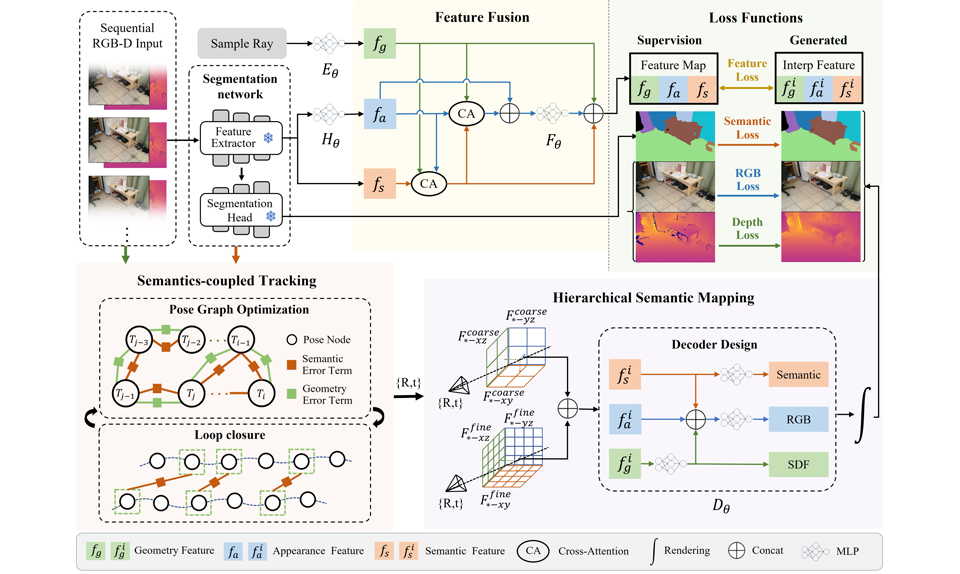 | Siting Zhu, Guangming Wang, Hermann Blum, Zhong Wang, Ganlin Zhang, Daniel Cremers, Marc Pollefeys, Hesheng Wang TPAMI 2025 Paper | Project website SNI-SLAM++ is a tightly coupled semantic SLAM system that achieves robust tracking and dense semantic mapping through hierarchical semantic encoding, cross-attention feature fusion, and a semantics-coupled tracking framework. |
 | Weirong Chen, Ganlin Zhang, Felix Wimbauer, Rui Wang, Nikita Araslanov, Andrea Vedaldi, Daniel Cremers ICCV 2025 (Best Paper Candidate) Github Repo | ArXiv | Project website A method for consistent dynamic scene reconstruction via motion decoupling, bundle adjustment, and global refinement. |
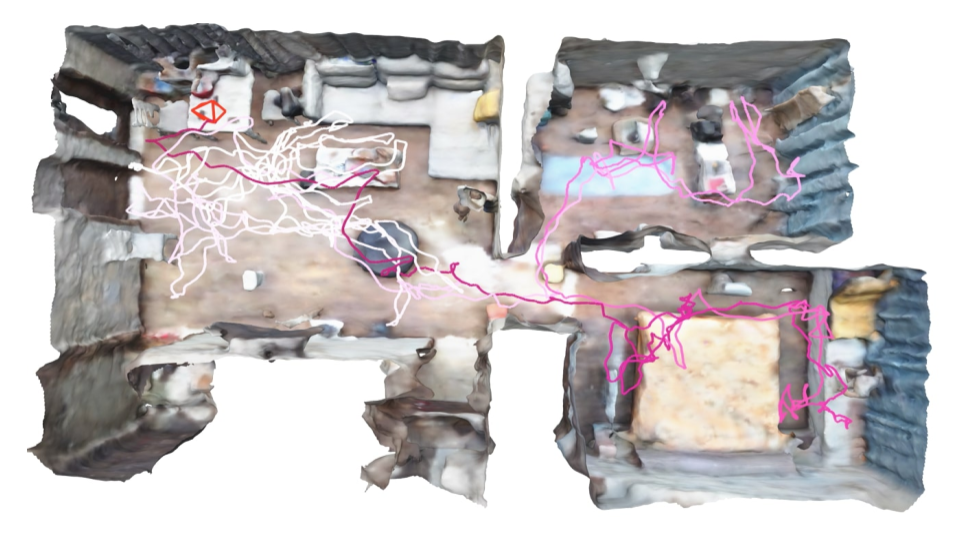
 | Erik Sandström*, Ganlin Zhang*, Keisuke Tateno, Michael Oechsle, Youmin Zhang, Manthan Patel, Luc Van Gool, Martin R. Oswald, Federico Tombari CVPRW 2025 Github Repo | Paper We use a keyframe based frame to frame tracker based on dense optical flow connected to a pose graph for global consistency. For dense mapping, we resort to a 3DGS representation, suitable for extracting both dense geometry and rendering from. |
 | Ganlin Zhang*, Erik Sandström*, Youmin Zhang, Manthan Patel, Luc Van Gool, Martin R. Oswald Preprint on ArXiv, 2024 Github Repo | ArXiv | Project website 1. A monocular SLAM pipeline with deformable neural point cloud scene representation. 2. Novel DSPO layer for BA, which can jointly optimize depth map, depth scale, and camera pose. |
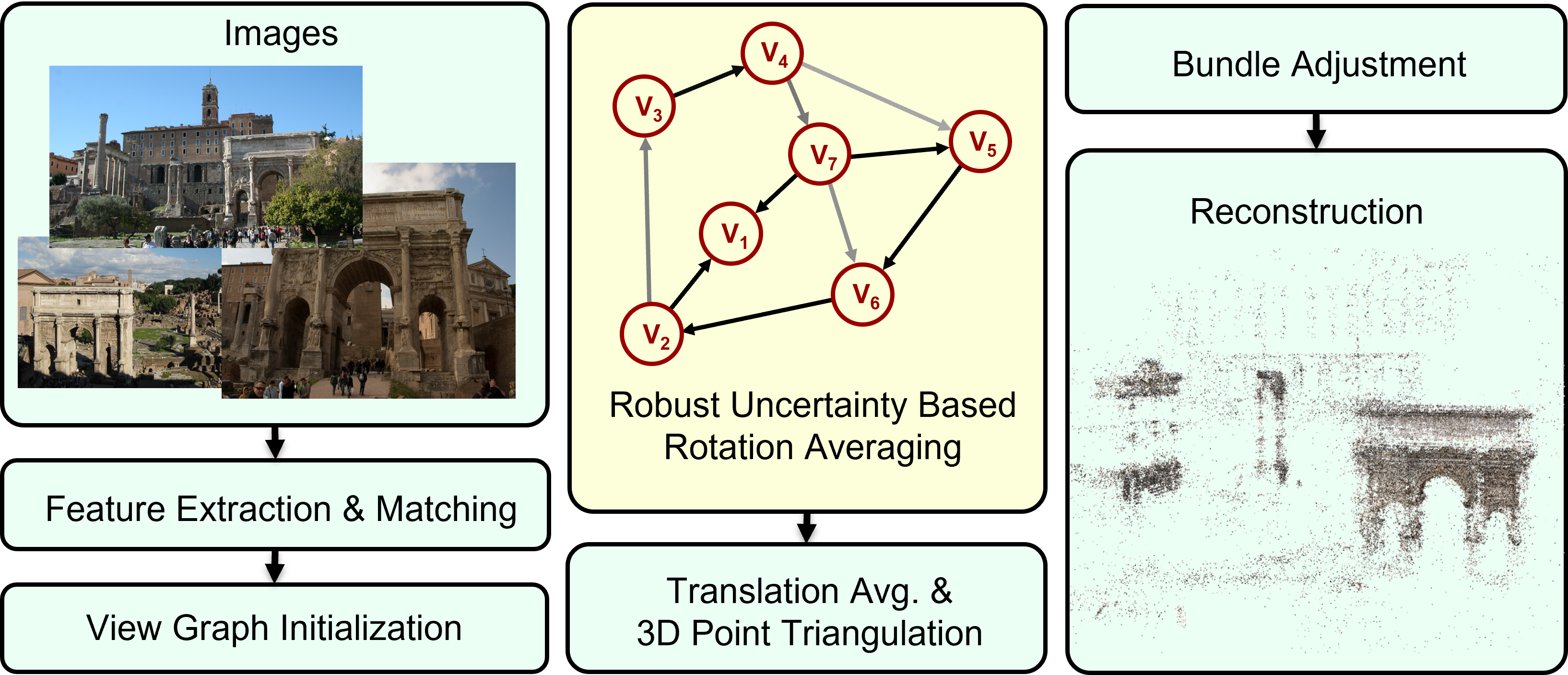 | Ganlin Zhang, Viktor Larsson, Daniel Barath CVPR 2023 Github Repo | ArXiv 1. Better model the underlying noise distributions by directly propagating the uncertainty from the point correspondences into the rotation averaging. 2. Integrate a variant of the MAGSAC++ loss into the rotation averaging, instead of using the classical robust losses. |
Selected Projects
 | Ganlin Zhang*, Deheng Zhang*, Longteng Duan*, Guo Han* Course project of Mixed Reality 2022 in ETH Zurich Github Repo | Project website In this project, we design, implement and deploy a mixed-reality-based method with HoloLens 2 that enables users to control the Boston Dynamics Spot robot. |
  | Ganlin Zhang, Deheng Zhang, Feichi Lu, Anqi Li Course project of 3D Vision 2022 in ETH Zurich Github Repo In this project, we present a sparse version of NICE-SLAM, which is a SLAM system incorporating the idea of Voxel Hashing into NICE-SLAM framework. Instead of initializing feature grids in the whole space, voxel features near the surface are adaptively added and optimized. |
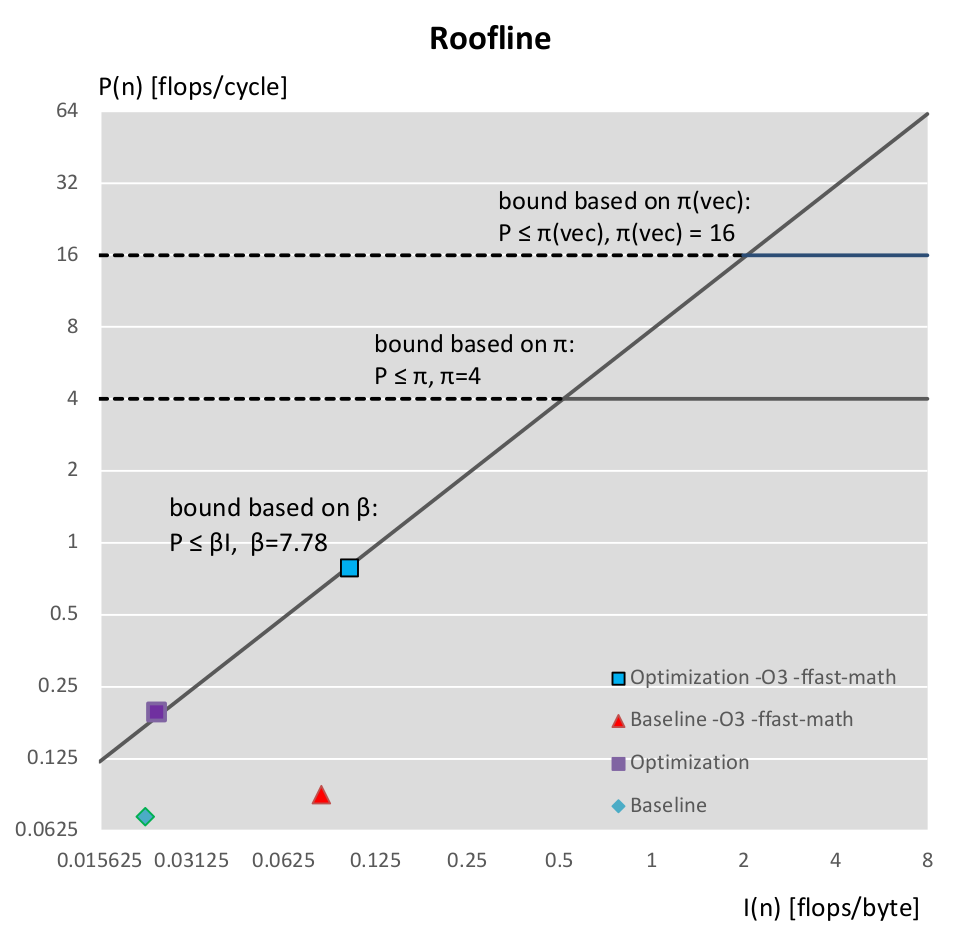 | Ganlin Zhang*, Deheng Zhang*, Junpeng Gao*, Yu Hong* Course project of Advanced System Lab 2022 in ETH Zurich Github Repo Focus on speeding up black-box optimization algorithm OPUS from paper Particle Swarm with Radial Basis Function Surrogates for Expensive Black-box Optimization by Rommel G. Regis. Besides, we implement the speed-up C++ version of Bunch-Kaufman Pivoting. |
 | Ganlin Zhang*, Haokai Pang*, Xinyu Shen*, Yunying Zhu* Course project of Deep Learning 2021 in ETH Zurich Github Repo Combining PSM Net, group-wise corr, dilatedResNet, semantic segmentation information to estimate accurate disparity of stereo image pairs efficiently. |
 | Ganlin Zhang*, Teng Xu*, Weijie Lyu*, Zhenzhong Tang*, Ziyuan Hu* Course project of Introduction to Robotics 2019 in UC Berkeley Github Repo | Project website We design a path-finding algorithm that could generate a path to draw a portrait/character in one stroke. Then we use our self-designed control system to draw this path. This project could be used with any arm-robot with at least 4 joints. |
Teaching
- Master Seminar - Modern Methods for 3D Representation and Reconstruction:
2025/26 Winter - Master Seminar - 3D Vision Foundation Models: 2025/26 Winter
- Practical Course: Deep Learning for Spatial AI: 2025 Summer