
EgoSpot
A Mixed-Reality-based project produced by
Ganlin Zhang *, Deheng Zhang *, Longteng Duan *, Guo Han *
Yuqian Fu, Danda Pani Paudel, Luc Van Gool, Eric Vollenweider
* Equally contribute to this project
Our Goals
Implementing and deploying a HoloLens 2 application that enables users to control the Boston Dynamics Spot robot using:
Eye tracking
Head movements
Voice control.
Extension
This project would be useful for any mobile robot with an arm.
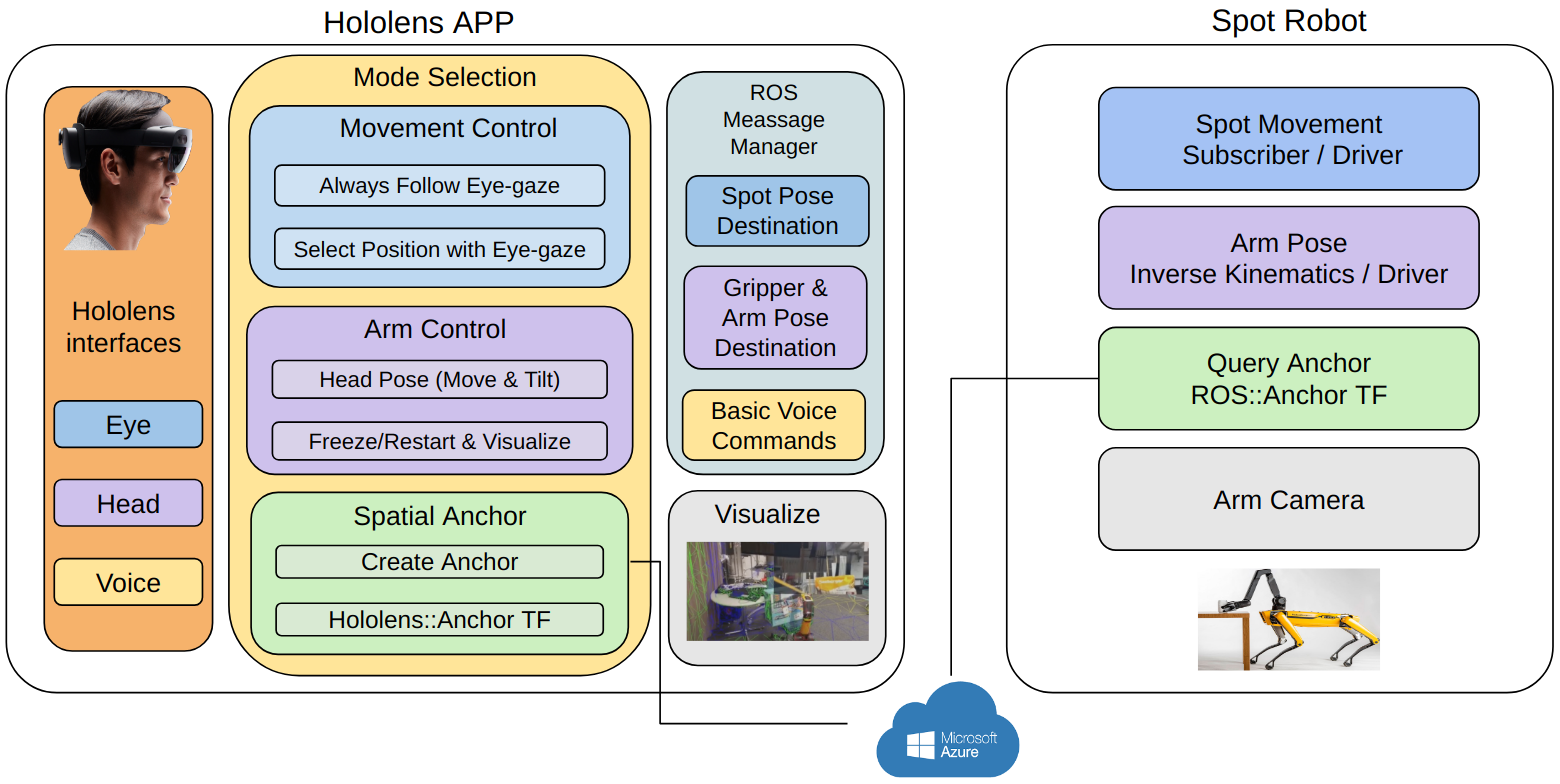
System Overview
Three different modes for different functions.
Microsoft Azure Spatial Anchor for co-localization.
Robot Operating System (ROS) for communication.
Video live stream on Hololens for better visualization
Movement Control
Follow Mode
Spot robot follow the
eye-gaze cursor
Select Mode
Spot robot goes to a
user-specified location
Come Here
Spot robot comes to
the user.
Arm Control
Head Control
Spot arm mimics the pose of
the user's head
Freeze Pose
Fix current arm's pose
restart at different position
Gripper Rotation
Rotate gripper by
tilting head