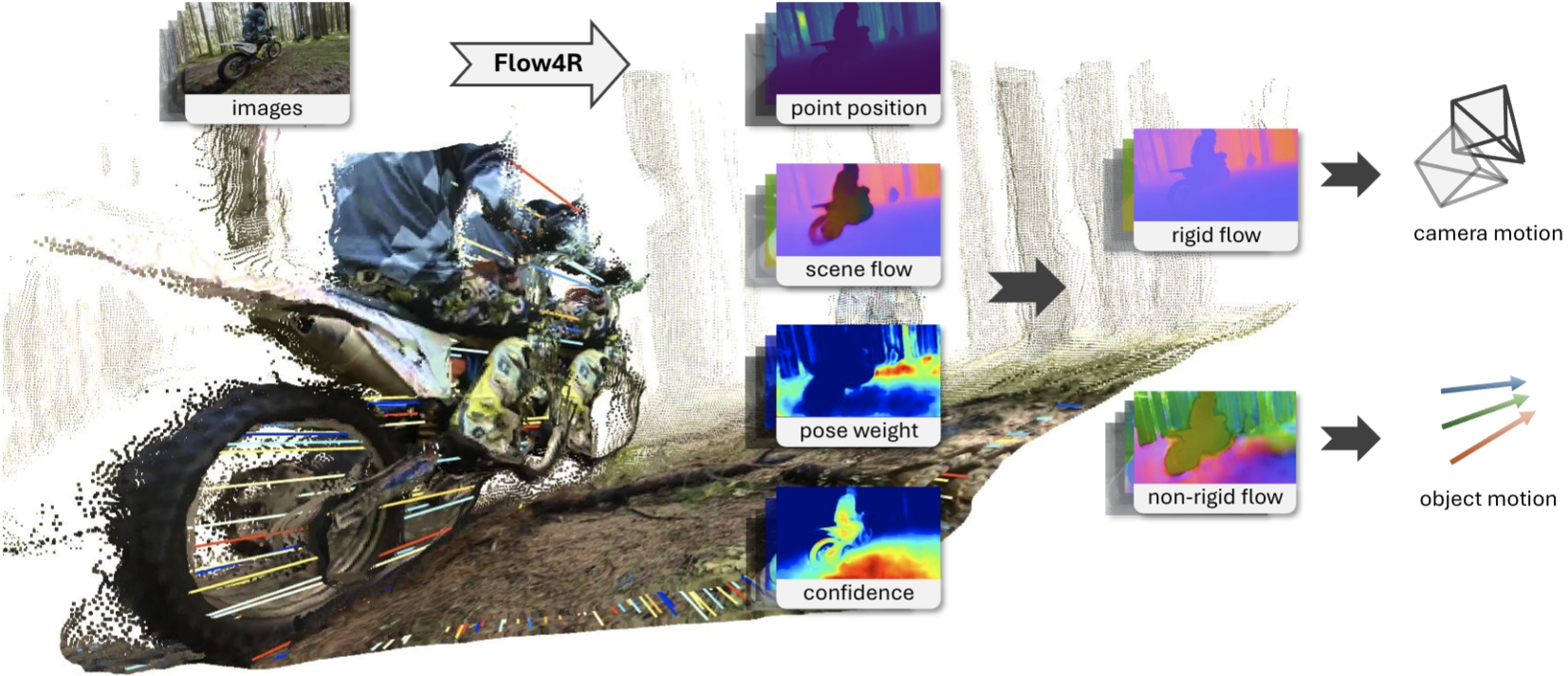
 | Shenhan Qian, Ganlin Zhang, Shangzhe Wu, Daniel Cremers Preprint on arXiv, 2026 arXiv | Project website Flow4R is a feed-forward framework for dynamic 4D reconstruction and tracking from unposed image pairs. By modeling camera-space scene flow as a unified representation of geometry, object motion, and camera motion, it predicts 3D position and bidirectional motion in a single forward pass without explicit pose regression or bundle adjustment, achieving state-of-the-art accuracy and temporal consistency. |
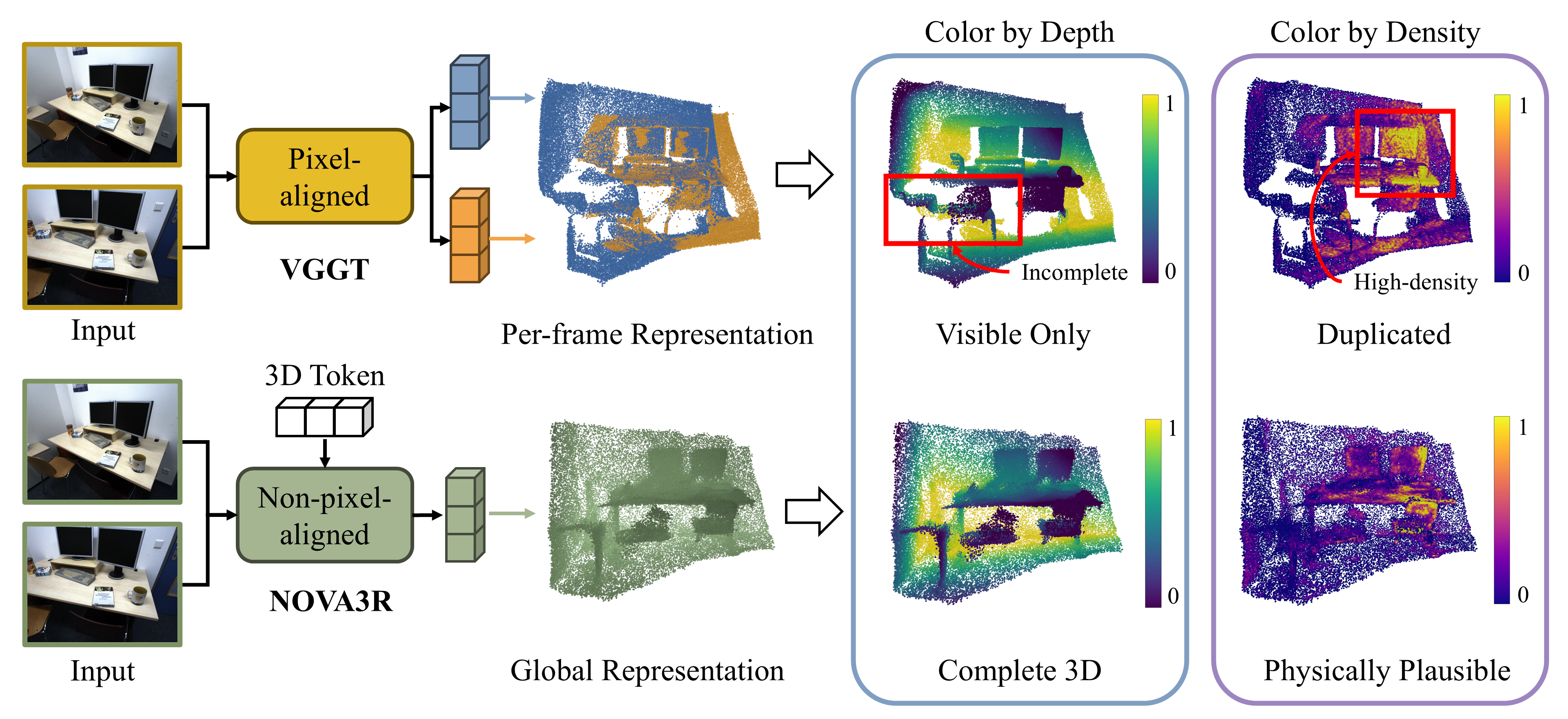 | Weirong Chen, Chuanxia Zheng, Ganlin Zhang, Andrea Vedaldi, Daniel Cremers ICLR 2026 Paper | Project website | Github Repo NOVA3R is a feed-forward method for non-pixel-aligned 3D reconstruction from unposed images that learns a global, view-agnostic scene representation via scene tokens and a diffusion-based 3D decoder, enabling complete and physically plausible geometry and outperforming state of the art in accuracy and completeness. |
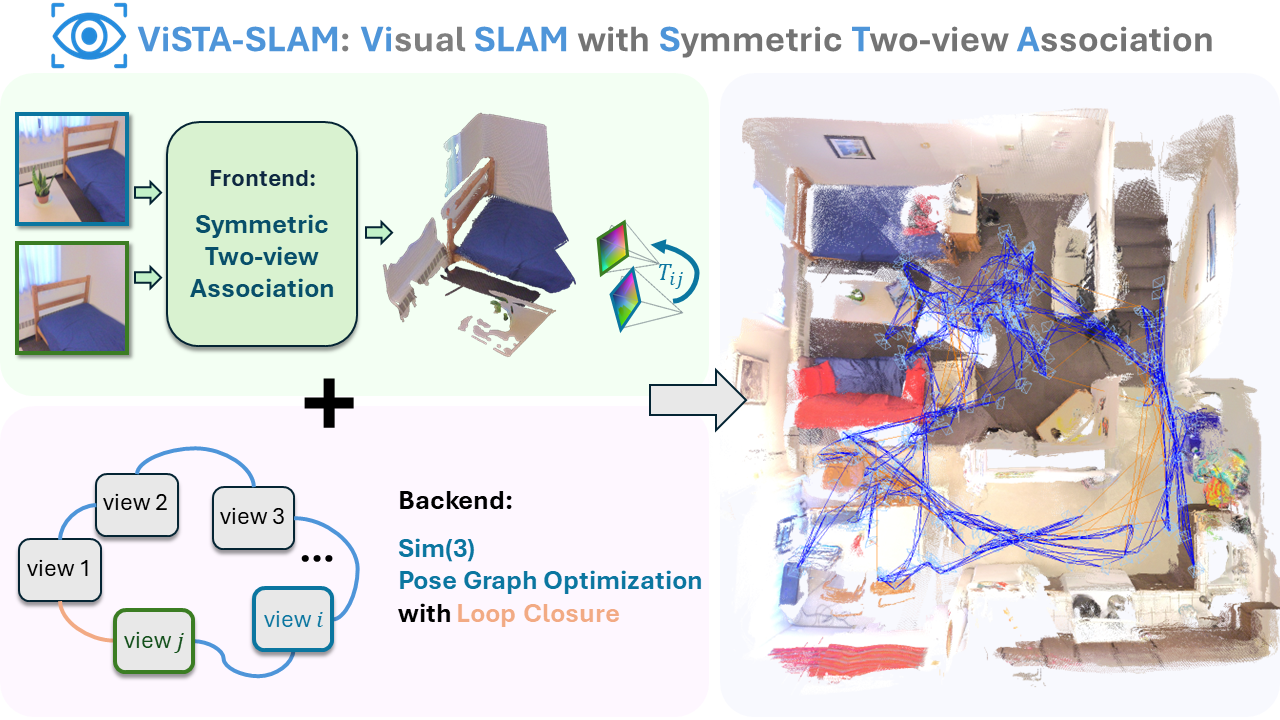 | Ganlin Zhang, Shenhan Qian, Xi Wang, Daniel Cremers 3DV 2026 Github Repo | arXiv | Project website ViSTA-SLAM is a real-time monocular dense SLAM pipeline that combines a Symmetric Two-view Association (STA) frontend with Sim(3) pose graph optimization and loop closure, enabling accurate camera trajectories and high-quality 3D scene reconstruction from RGB inputs. |
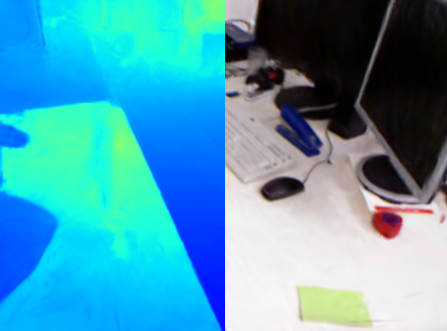
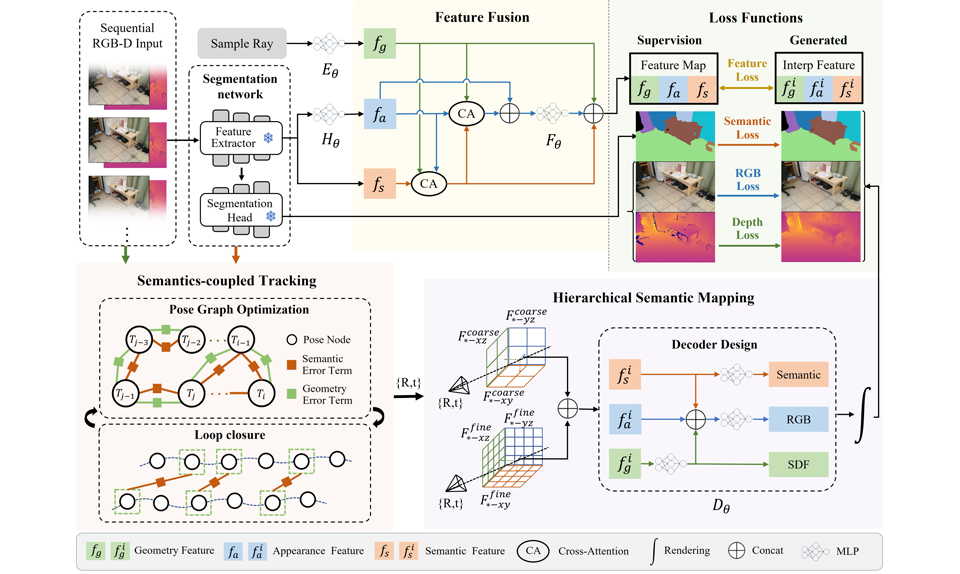 | Siting Zhu, Guangming Wang, Hermann Blum, Zhong Wang, Ganlin Zhang, Daniel Cremers, Marc Pollefeys, Hesheng Wang TPAMI 2025 Paper | Project website SNI-SLAM++ is a tightly coupled semantic SLAM system that achieves robust tracking and dense semantic mapping through hierarchical semantic encoding, cross-attention feature fusion, and a semantics-coupled tracking framework. |
 | Weirong Chen, Ganlin Zhang, Felix Wimbauer, Rui Wang, Nikita Araslanov, Andrea Vedaldi, Daniel Cremers ICCV 2025 (Best Paper Candidate) Github Repo | arXiv | Project website A method for consistent dynamic scene reconstruction via motion decoupling, bundle adjustment, and global refinement. |
 | Erik Sandström*, Ganlin Zhang*, Keisuke Tateno, Michael Oechsle, Youmin Zhang, Manthan Patel, Luc Van Gool, Martin R. Oswald, Federico Tombari CVPRW 2025 Github Repo | Paper We use a keyframe based frame to frame tracker based on dense optical flow connected to a pose graph for global consistency. For dense mapping, we resort to a 3DGS representation, suitable for extracting both dense geometry and rendering from. |
 | Ganlin Zhang*, Erik Sandström*, Youmin Zhang, Manthan Patel, Luc Van Gool, Martin R. Oswald Preprint on arXiv, 2024 Github Repo | arXiv | Project website 1. A monocular SLAM pipeline with deformable neural point cloud scene representation. 2. Novel DSPO layer for BA, which can jointly optimize depth map, depth scale, and camera pose. |
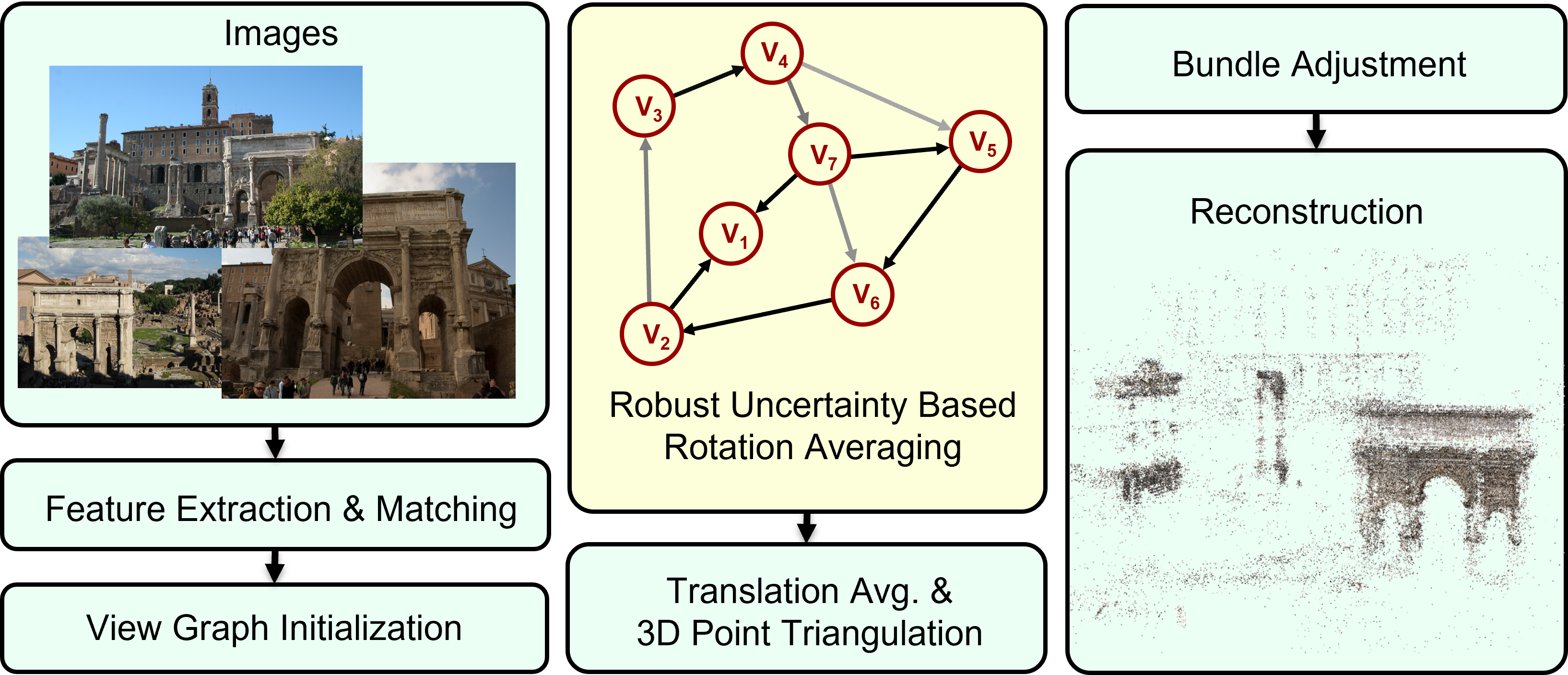 | Ganlin Zhang, Viktor Larsson, Daniel Barath CVPR 2023 Github Repo | arXiv 1. Better model the underlying noise distributions by directly propagating the uncertainty from the point correspondences into the rotation averaging. 2. Integrate a variant of the MAGSAC++ loss into the rotation averaging, instead of using the classical robust losses. |